Holoscan Platform for Robotics and Edge AI
Ethernet Sensor Bridges and the Next Generation of Edge AI Systems
For more than a decade, embedded vision systems have relied on two dominant interfaces: MIPI-CSI and GMSL. These standards were good enough for automotive ADAS, drones, and early robotics. They offered reliability and adequate bandwidth at a small scale.
But the requirements have changed:
- Defense programs now field distributed sensor fusion across vehicles, ships, and unmanned systems.
- Robotics are moving from lab prototypes with two or three cameras to fleets with dozens of vision, radar, and lidar nodes.
- Healthcare and industrial inspection demand higher bandwidth, tighter synchronization, and safety-certifiable architectures.
In this environment, MIPI and GMSL show their limits.
Why It’s Time to Move Beyond MIPI-CSI and GMSL
MIPI-CSI:
- Short reach – designed for PCB-level connections, not vehicle or platform-scale systems. The cable length is limited to around 30cm.
- Point-to-point only – every new sensor requires a direct link, adding complexity as counts grow.
- Scaling beyond a few links requires custom bridges or FPGAs.
GMSL:
- Built for automotive, with EMI resilience and reliable coax transmission.
- Practical for 2–6 cameras, but scaling further is complex.
- Proprietary PHYs lock you to vendors.
- No multicast support: every stream is point-to-point.
- Synchronization limited by PHY-level timing, not system-wide clocks.
Shared flaw: both push sensor data through the CPU before the GPU. That means extra latency, jitter from OS scheduling, and additional CPU heat – already the thermal bottleneck in many rugged systems.
For defense and robotics, these constraints can be showstoppers.
Ethernet + Holoscan Changes the Model
NVIDIA’s Holoscan SDK and Thor AGX platform shift sensor ingress from CPU-managed links to Ethernet with GPUDirect RDMA. This architecture streams data directly into GPU memory, bypassing the CPU entirely.
Engineering implications:
- Lower Latency
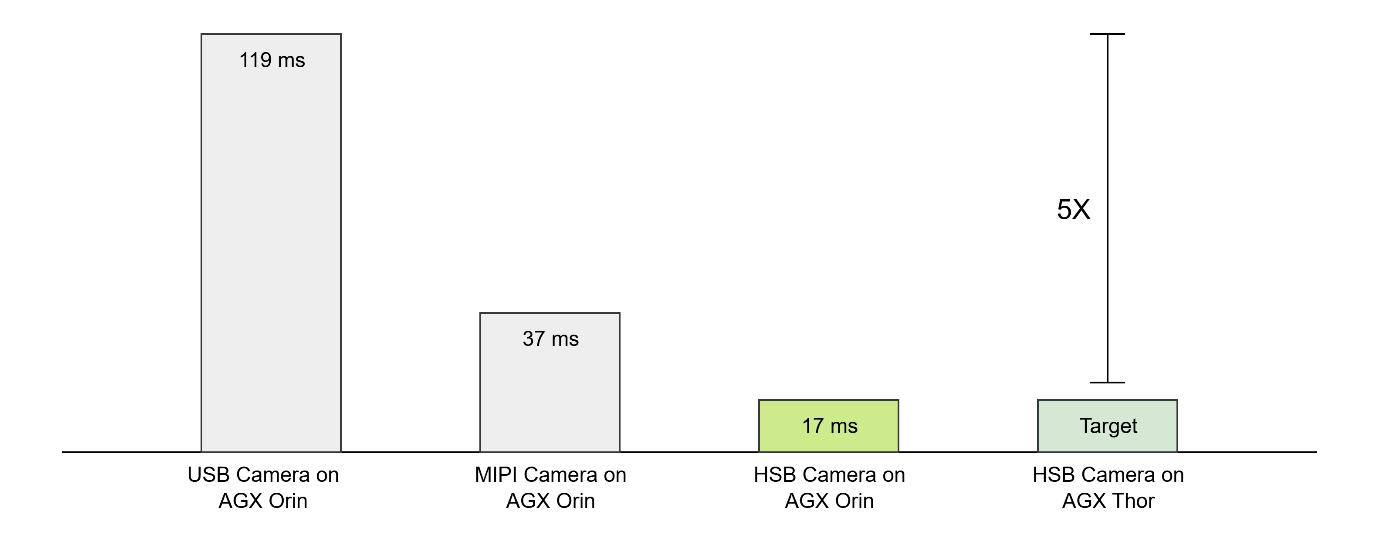
Removing CPU buffering eliminates context switches and driver overhead. Benchmarks show up to 5× lower latency compared to USB, and ~1.5× lower compared to MIPI. For radar, EO/IR, or autonomy pipelines where microseconds matter, this is decisive. - Determinism
With no OS scheduling in the path, jitter drops significantly. IEEE 1588-2019 PTP synchronization aligns multiple boards to sub-microsecond precision. Distributed arrays of sensors can now operate in phase across vehicles or unmanned platforms. - Thermal headroom
CPUs no longer manage sensor ingress. That frees cycles, reduces utilization, and most importantly, cuts heat generation. In rugged defense and robotics deployments, where cooling is the hardest part of the design, this translates directly into more reliable systems. - Scalability
Adding sensors means adding Ethernet bandwidth or switch ports. The same network that supports four cameras today can support forty tomorrow – without redesigning CPU pipelines. - Multicast
A single camera feed can be consumed by multiple GPU pipelines simultaneously – one for navigation, one for targeting, one for operator display. GMSL and MIPI topologies can’t do this natively. - Safety and Security
Ethernet brings built-in support for MACSec, packet watermarking, redundancy, and hooks for SIL-2 compliance. These features are not bolt-ons but part of the end-to-end architecture.
This is not just a faster pipeline. It is a cleaner, more efficient system design for multi-sensor AI workloads.
What is NVIDIA Holoscan?
Holoscan is a multimodal computing platform designed for the edge, providing an accelerated end-to-end software stack for scalable, software-defined, real-time processing of streaming data.
Holoscan Sensor Bridge Software
Holoscan Sensor Bridge software consists of two main components:
- NVIDIA Holoscan SDK – Build high-performance streaming applications by composing modular operators into customizable pipelines
- Holoscan Sensor Bridge host software – Build custom pipelines and process data from network-connected sensors using ready-to-use operators for tasks such as image conversion, signal processing, inference, and visualization
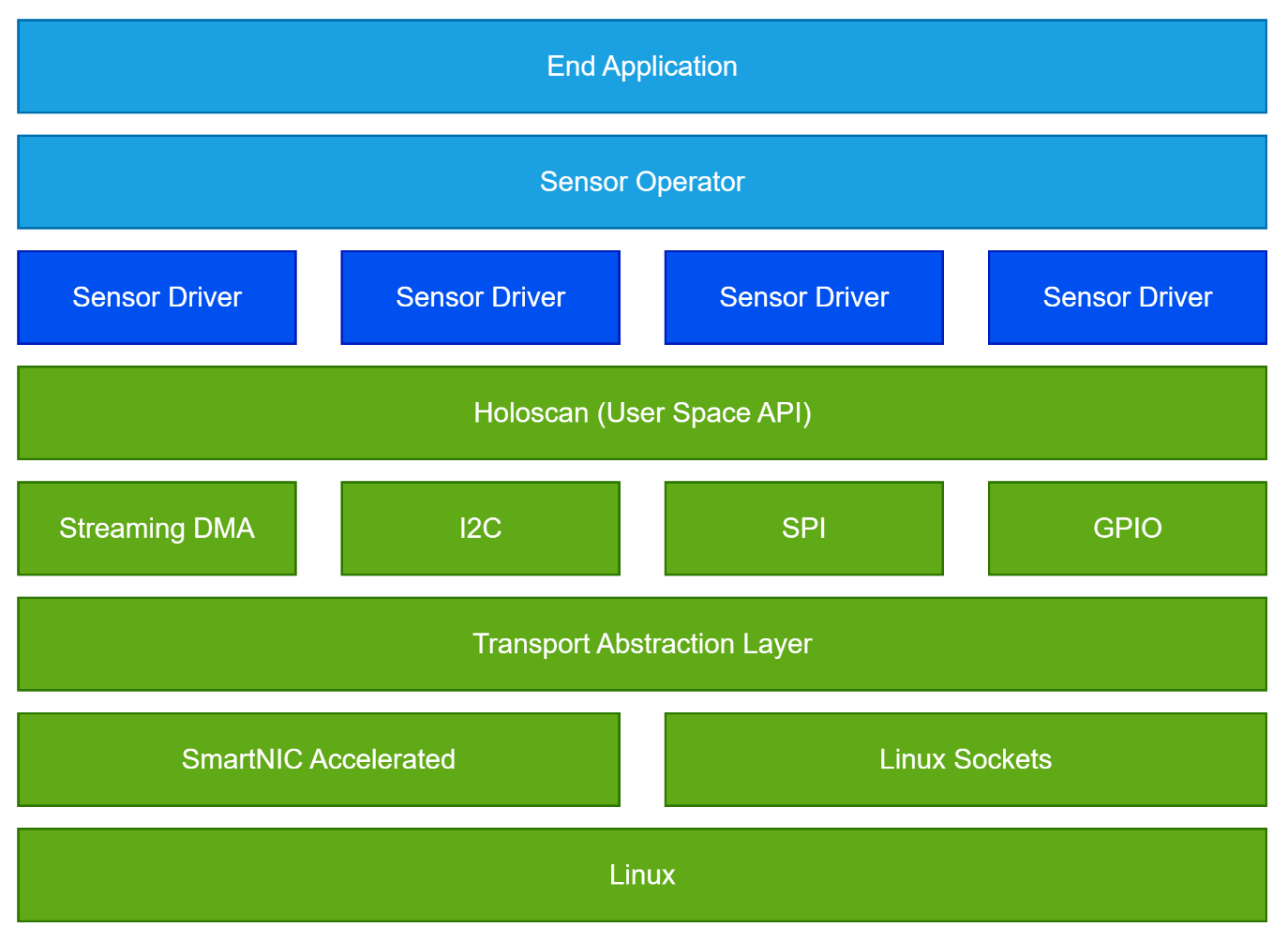
Holoscan applications separate the main application and define the data pipeline with the necessary operators in a configure method.
With the User Space API, HSB connects sensor operation with the Linux endpoint in a way that developers focus on the pipeline and the operations required for the specific application.
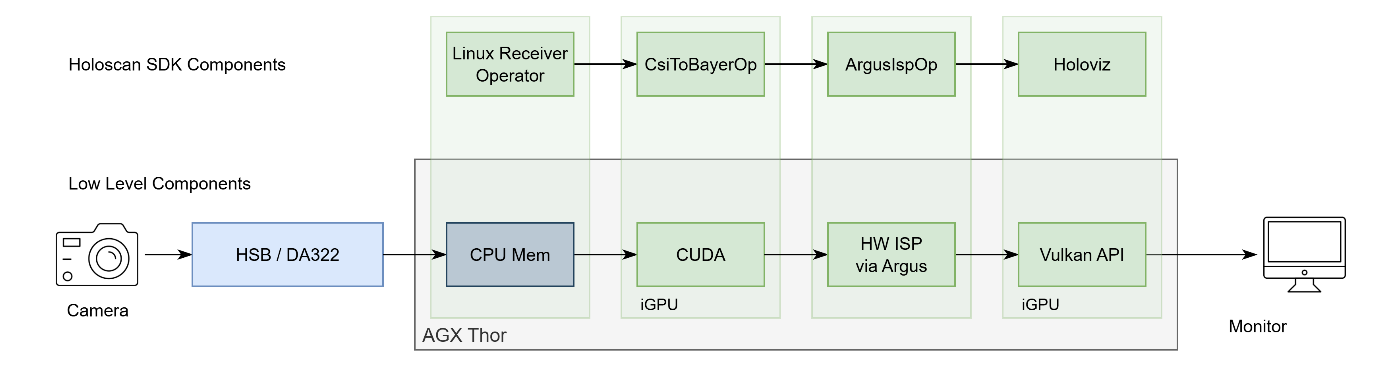
Holoscan Sensor Bridge Performance
Embedded systems require high-resolution, high-frame-rate data with low latency and precise synchronization. Holoscan Sensor Bridge (HSB) meets these requirements, delivering up to 5 times lower latency than USB cameras (119ms) and 1.5 times lower latency than MIPI cameras (37ms). By leveraging RDMA and camera over Ethernet, HSB transfers data directly into GPU memory with virtually zero CPU utilization, enabling real-time processing and faster system response.
HSB enhances embedded system performance by replacing traditional kernel-space camera drivers with user-space APIs, eliminating the need for separate drivers for camera and control functionalities. This approach simplifies development complexity, allowing developers to focus on application logic. HSB’s modular design supports various Image Signal Processor (ISP) options, including NVIDIA CUDA-based ISPs, soft-ISP implementations on HSB hardware, and internal ISPs found on NVIDIA Jetson AGX and IGX platforms.
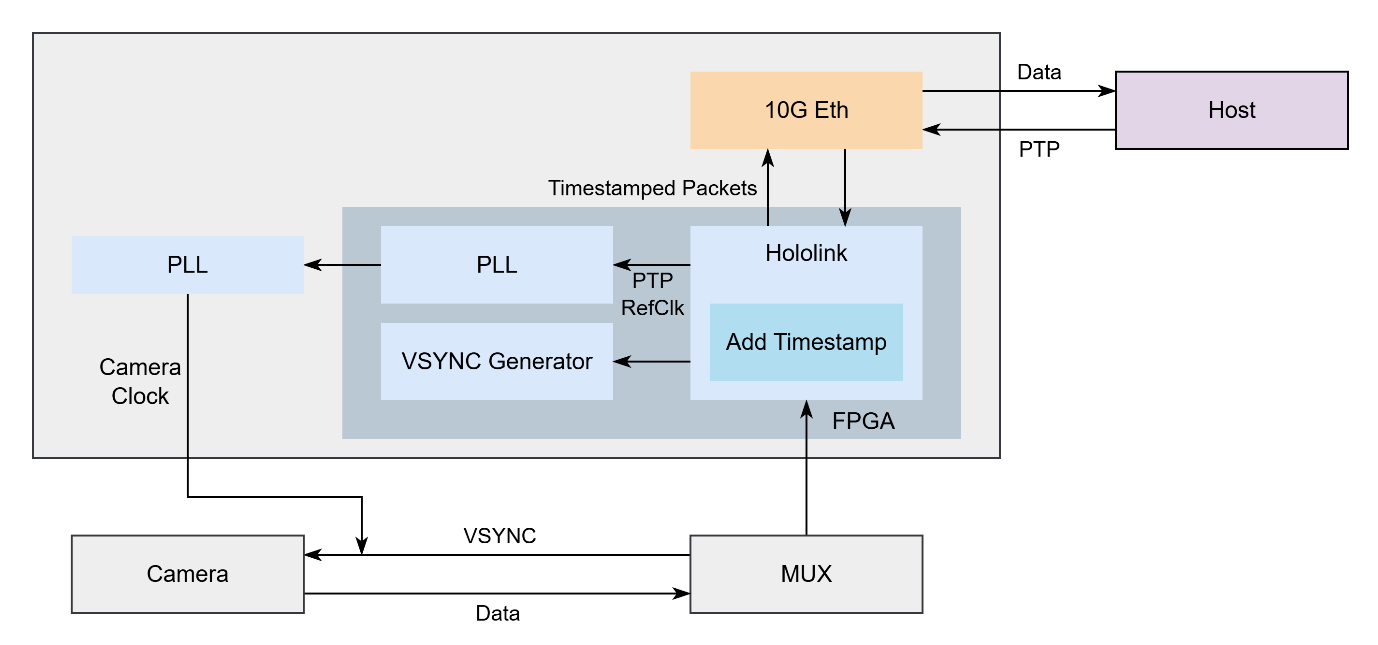
Precision Time Protocol (PTP)
One of the key features supported by HSB is Precision Time Protocol (PTP), which enables the HSB to synchronise its internal clock with the host system. HSB achieves synchronisation accuracy of 1µs and better, allowing developers to precisely track exactly when each event occurs and align data across multiple sources.
Sensor Bridges: Why They Matter
Holoscan defines the architecture, but engineers still need a way to connect physical sensors to an Ethernet network. This is where sensor bridges come in.
- NVIDIA provides the GPUs and SDK.
- Lattice offers a Holoscan devkit – useful for exploration, but built around dual FPGAs and not production-ready.
- What the market lacks is a deployable bridge: something engineers can prototype with in the lab, then bolt directly into a rugged system without redesign.
That gap is exactly what Tauro Technologies’ DA322 Holoscan MIPI Adapter fills.
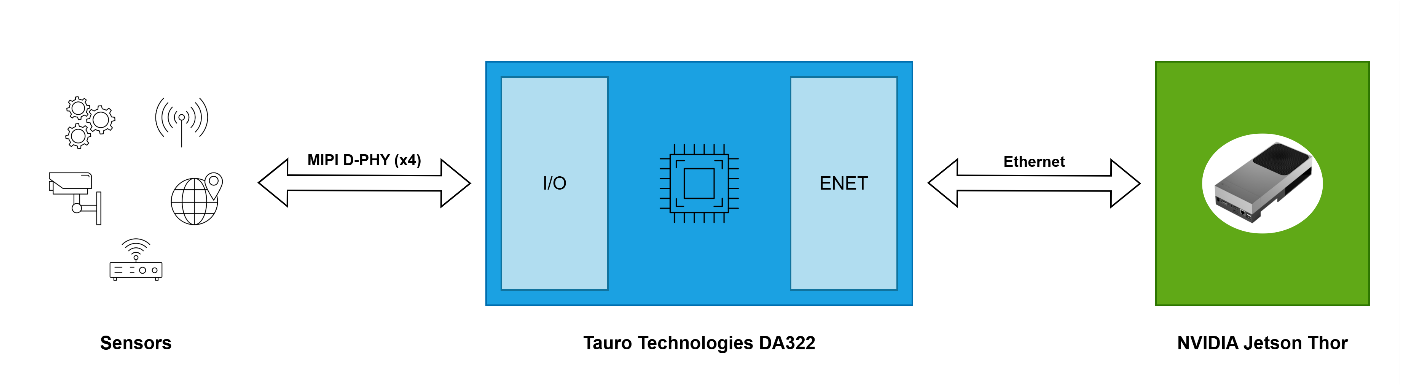
DA322 Holoscan MIPI Adapter
The DA322 provides a compact, rugged bridge from MIPI sensors into an Ethernet-based Holoscan pipeline
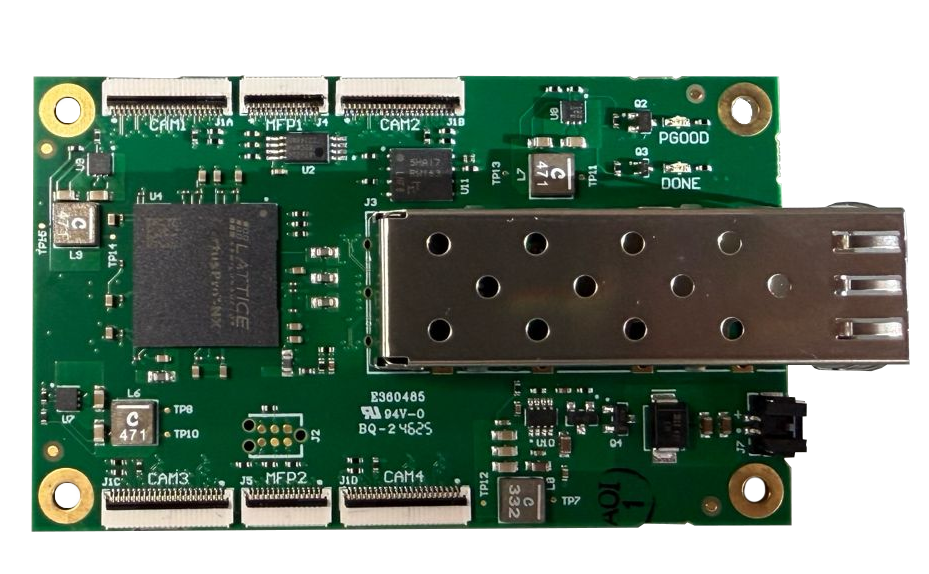
Unlike devkits, the DA322 is production-ready. It supports two distinct use cases:
-
- Prototyping: Engineers can connect up to four MIPI sensors, stream over 10GbE, and validate Holoscan pipelines quickly.
-
- Deployment: The same hardware can be mounted in defense platforms, robotic fleets, or medical devices without a redesign. The DA322 is only 75×45×15mm and can be sized down/up depending on product requirements.
Roadmap: Beyond 4-Lane MIPI
The DA322 demonstrates the model with four MIPI CSI-2 D-PHY lanes. However, some real-world systems require a mix of sensor types and counts. Tauro Technologies has deployed customized systems with I/O, including:
-
- GMSL bridges: to migrate automotive-grade sensors into Ethernet topologies without redesign.
-
- Radar/Lidar bridges: extending the same low-latency Ethernet path to RF and optical sensing modalities.
-
- Custom I/O variants: bespoke designs with the right mix of ingress interfaces for primes and OEMs.
Product design and flexibility are Tauro Technologies’ specialty – sensor ingress tailored to your exact requirements.
Why It Matters for Your Next System
For engineers building the next generation of edge AI systems, the benefits are clear:
-
- Remove the CPU bottleneck: Lower latency, lower jitter, and reduced thermal load.
-
- Scale without rework: Ethernet networks scale naturally as sensor counts grow.
-
- Meet determinism and safety requirements: PTP sync, SIL-2 compliance, built-in security.
-
- Prototype and deploy on the same hardware: Faster development cycles and lower NRE.
GMSL and MIPI fit the previous generation. Ethernet + Holoscan is right for the next one.
Conclusion
Every major industry that outgrew point-to-point links – from datacenters to telecom to automotive – standardized on Ethernet. Sensor fusion for AI is following the same trajectory.
-
- MIPI-CSI: good for phones and embedded modules.
-
- GMSL: good for ADAS-scale automotive.
-
- Ethernet + Holoscan: the right architecture for distributed, multi-sensor, safety-critical AI platforms.
Tauro Technologies’ DA322 Holoscan MIPI Adapter provides the bridge into this model – not as a devkit locked in the lab, but as a product that can be deployed today.
Interested to know more? Get in touch with us for details.
Goodbye GMSL. Hello Holoscan.